
Якорь присоска: Якорь-присоска 5 кг | магазин BORIKA FASTen
Якорь Присоска-5 кг окрашенный, в сумке
Безумные скидки продолжаются до 18.08!
ОСТАЛОСЬ:
Характеристики
| Для судов длиной | до 5 м |
| Тип грунта | глина, песок, ил |
| Материал | сталь |
Размеры и вес
| Длина веревки | 25 м |
| Габариты | 220х220х70 мм |
| Веc | 5 кг |
Описание
Якорь «Присоска» предназначен для использования на надувных лодках с грузоподъёмность не более 500 кг и глубинах 6-8 метров.
Якорь покрашен по современной технологии термо-полимерного покрытия.
Комплектуется фалом и сумкой для хранения и переноски якоря.
Примечание
Производитель оставляет за собой право на внесение изменений в конструктивные особенности товара, его комплектацию и дизайн.
Пожалуйста, перед совершением покупки сверяйте характеристики интересующего вас товара, в том числе и информацию о наличии данной позиции.
Информация о производителе
| Производитель | Радикал |
| Страна производителя | Россия |
Якорь Присоска-5 кг окрашенный, в сумке
ЗакрытьЗакрыть
ЗакрытьНашли дешевле?
Самодельный якорь-присоска
«Якорь — приспособление для удержания на месте судна» — гласит энциклопедический словарь. Рыболовы, использующие надувные лодки, постоянно сталкиваются с проблемой удержания лодки на глинистом грунте. Используются для этого громоздкие тракторные траки, сетки с камнями, мешки с песком. Последние относятся к самым надежным «якорям», но они, как правило, громоздки и ставятся стационарно в выбранном уловистом месте. Но это не лучший вариант — ведь никто не даст гарантии, что завтра к твоему якорю не пришвартуется незнакомый рыболов.
Рыболовы, использующие надувные лодки, постоянно сталкиваются с проблемой удержания лодки на глинистом грунте. Используются для этого громоздкие тракторные траки, сетки с камнями, мешки с песком. Последние относятся к самым надежным «якорям», но они, как правило, громоздки и ставятся стационарно в выбранном уловистом месте. Но это не лучший вариант — ведь никто не даст гарантии, что завтра к твоему якорю не пришвартуется незнакомый рыболов.
Каждый тип якорей имеет свои преимущества и свои недостатки. Двурогие (якоря Холла и Брандта) хорошо держат, глубоко зарываясь в илистый грунт, но требуют большого отпуска якорного шнура, что приводит к рысканиям лодки. Выход один — постановка на двух якорях.
Опробовал я и четырехрогий 7-килограммовый якорь, купленный как-то на Птичьем рынке. Удержание у него завидное, но он не любит коряжистых мест. В одном из таких мест, в Парашкиной протоке на Волге, я его и оставил в конце концов.
Предлагаю якорь собственной конструкции, которым я в целом доволен. В основу конструкции якоря положен принцип изготовления железобетонных мертвых якорей — монолитов для рейдовых бочек. На таких бочках, на заведенных бриделях (цепь калибра 75 мм и более), удерживаются… авианосцы. Случаев стаскивания с точки таких якорей история не знает, а вот цепи при сильных порывах ветра рвались.
В основу конструкции якоря положен принцип изготовления железобетонных мертвых якорей — монолитов для рейдовых бочек. На таких бочках, на заведенных бриделях (цепь калибра 75 мм и более), удерживаются… авианосцы. Случаев стаскивания с точки таких якорей история не знает, а вот цепи при сильных порывах ветра рвались.
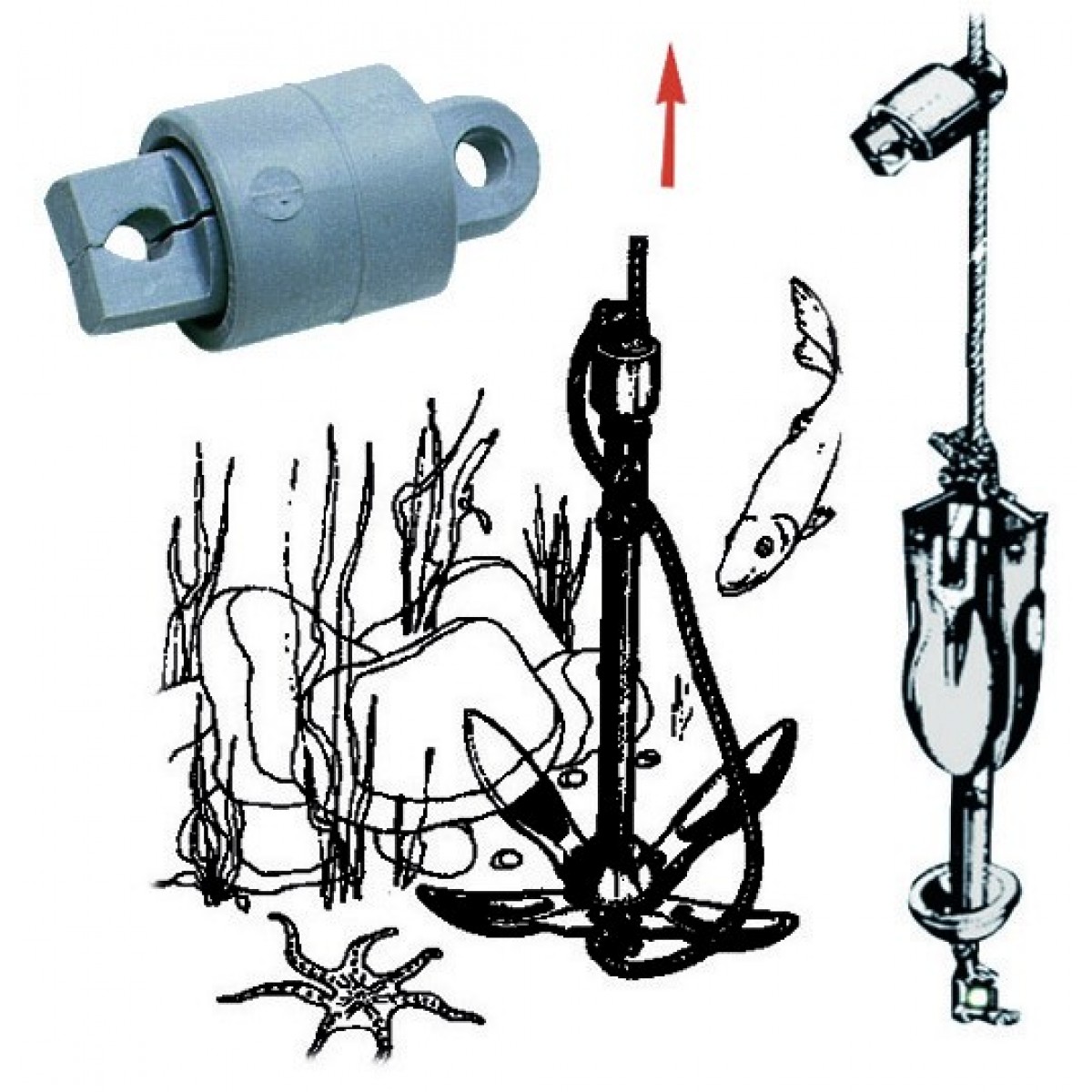
Главная особенность такого якоря — полусферическое (сильно вогнутое) основание-присоска. Даже незначительно врезавшись краями в глинистый грунт, якорь-присоска хорошо удерживает лодку даже на течении.
Я смастерил два круглых свинцовых якоря разных диаметров. В принципе из экологических соображений якорь можно выточить из стали на токарном станке или изготовить на прессе. Предлагаю свой, доступный для изготовления в гаражных условиях, способ. Для этого понадобится жестяная банка диаметром 120-150 мм, рым с гайкой или барашек с болтом (фото 1), 5 кг свинца, емкость для плавки, паяльная лампа или газовая горелка и немного глины или гипса.
Фото 1. Pым с гайкой или барашек с болтомИз круто замешанной глины готовлю лепешку, соизмеримую с вогнутостью будущего якоря. Выкладываю лепешку на дно банки снаружи и раздавливаю глину, оставляя 3 мм до краев. Если глина «вылезла» — срезаю лишнее по кругу узкой отверткой. Смоченной ладонью добиваюсь ровной «пирожковой» формы толщиной 25-30 мм. При комнатной температуре через сутки-двое «пирожок» высохнет. Если появятся трещины при высыхании, то их нужно загладить жидкой глиной.
Выкладываю лепешку на дно банки снаружи и раздавливаю глину, оставляя 3 мм до краев. Если глина «вылезла» — срезаю лишнее по кругу узкой отверткой. Смоченной ладонью добиваюсь ровной «пирожковой» формы толщиной 25-30 мм. При комнатной температуре через сутки-двое «пирожок» высохнет. Если появятся трещины при высыхании, то их нужно загладить жидкой глиной.
После полного высыхания отделяю «пирожок» и помещаю его внутрь банки. Можно использовать банку от краски подходящего диаметра, подрезав ее по высоте.
По центру при помощи перекладины, которая опирается на края банки, устанавливаю рым с гайкой (барашек с болтом) длиной не более 30 мм. Разогреваю горелкой всю конструкцию до 40-50° и аккуратно заливаю расплавленным свинцом до уровня отверстия рыма. При соблюдении всех условий расплав ложится равномерно без пузырьков, образуя зеркальную поверхность. Даю заливке остыть на воздухе и освобождаю якорь из банки, разрезав жесть ножницами. Удаляю глину и обрабатываю края крупным напильником.
Завожу серьгу в рым, привязываю якорный шнур — и можно ехать на рыбалку испытывать изделие.
Мой якорь, который я использую для «Уфимки-22», имеет следующие характеристики: вес — 5,5 кг, диаметр — 125 мм, толщина заливки — 50 мм, вогнутость — 25 мм. Он занимает совсем мало места в лодке, не способен ее проколоть и не мешает при ловле. К тому же он не тащит с собой со дна массу грязи.
Удерживающая сила этого якоря, по моим субъективным ощущениям, значительно больше, чем у его собратьев такой же массы, особенно если речь идет о промытых глинистых речных грунтах.
При постановке на якорь надо соблюдать одно условие: обеспечить свободное его падение. Стабилизируясь при вертикальном погружении якорным шнуром, он врезается краями в грунт, как бы присасывается, чем и обеспечивается дополнительная удерживающая сила.
И еще пару слов о хранении якорного шнура. Из водостойкой фанеры я вырезал мотовило размером 270×120 мм с ручкой и с двумя прорезями-зажимами (фото 2).
Выбрав шнур, фиксирую его в прорези, чтобы не разматывался. От возможного случайного падения мотовила в воду страхует свободный метровый конец якорного шнура, который я с помощью альпинистского замка креплю к сиденью в лодке.
Автор: В.Русалов
<<<Вернуться в раздел
Якоря-присоски сегментные чугунные | Литейный механический завод «Союз» Псковский
Якоря-присоски сегментные чугунные
Плавучие маяки, знаки навигационного ограждения, понтоны, плавучие трубопроводы, рейдовые якорные бочки и многие другие плавучие сооружения не могут обойтись без якорей. Для них, нуждающихся в надежной якорной стоянке в течение длительного периода, разработаны так называемые мертвые якоря. Издавна в качестве таких удерживающих грузов использовали каменные глыбы, деревянные, а иногда и железные клетки, наполненные каменным или чугунным балластом.
Литейный механический завод «СОЮЗ» отливает и предлагает к покупке якоря-присоски сегментные чугунные (изготовленные по по ГОСТ 22463-77) для постановки плавучих знаков обстановки и буев.
Якорь-присоска чугунный: различия и применение
Их разделяют на два типа: направленного действия, когда якорь может держать в пределах заданного в плане угла, и кругового действия, например якорь-присоска сегментный чугунный, когда он держит под любым углом в плане. Обычно такие якоря укладывают или врывают в грунт с помощью киллекторных судов или плавучих кранов.
На мягких илистых или мелкопесчаных грунтах хорошо работают железобетонные массивы в виде четырехгранной или многогранной пирамиды (см. рис. 255), так называемые «лягушки» (рис. 256) и сегменты (он же наш якорь-присоска чугунный, рис. 257). «Лягушки» и сегменты держат не только за счет своего большого веса, но и за счет присасывания, которое возникает благодаря полукруглой выемке в их нижней части.
К числу мертвых якорей направленного действия следует отнести железобетонный якорь, предложенный в 1961 г. советскими инженерами Р. Г. Мелешковым и Г. М. Ершом. Он выполнен в виде трапеции со сквозным проемом и имеет два ребра, которые оказывают сопротивление силе, вырывающей якорь из грунта. Сосредоточение основной массы якоря в его хвостовой части увеличивает устойчивость якоря против опрокидывания.
Обычно массу мертвых якорей выбирают в зависимости от размеров плавучего сооружения, которое они предназначены удерживать на водной поверхности. Однако у гидрографов и путейцев-водников не всегда под рукой есть твердые нормативы на типы и массу мертвых якорей. Поэтому мертвые якоря из чугуна или железобетона нередко излишне тяжелы. Например, при проектировании судоходной обстановки на Камском водохранилище для установки малых речных буев был рекомендован чугунный сегментный якорь-присоска в 250—300 кг. Опыт эксплуатации Камского водохранилища показал, что для установки указанных буев требовался якорь не более 100 кг.
Крючок одинарный якорь синий скотч Maritime Moroshka
Артикул: 420008880
Крючки АкваЛиния прозрачные 3 шт на присоске
55.– за шт
Артикул: 420008845
Крючок АкваЛиния W69 коричневый на присоске
59. – за шт
– за шт
Артикул: 420008844
Крючок АкваЛиния W69 голубой на присоске
59.– за шт
Артикул: 420008879
Крючок АкваЛиния Ромашка синий на присоске
69. – за шт
– за шт
Артикул: 420008878
Крючок АкваЛиния Ромашка красный на присоске
69.– за шт
Артикул: 420008877
Крючок АкваЛиния Ромашка зеленый на присоске
69. – за шт
– за шт
Артикул: 420008876
Крючок АкваЛиния Бабочка синий на присоске
69.– за шт
Артикул: 420008875
Крючок АкваЛиния Бабочка красный на присоске
69. – за шт
– за шт
Артикул: 420008874
Крючок АкваЛиния Бабочка зеленый на присоске
69.– за шт
Артикул: 420008868
Крючки АкваЛиния Овал 2 шт самоклеящиеся металл
69. – за упак
– за упак
Артикул: 420008873
Планка на 4 крючка АкваЛиния самоклеящиеся микс
79.– за шт
Артикул: 420008867
Крючки АкваЛиния 2 шт самоклеящиеся металл
79. – за упак
– за упак
Артикул: 420006039
Крючок Fresh Code двойной самоклеящийся нержавеющая сталь
79.– за шт
Артикул: 420009086
Крючок PRIMANOVA на стекло S-образный пластик прозрачный
89. – за шт
– за шт
Артикул: 420007384
Крючок Kleber Home прозрачный
89.– за шт
Артикул: 420009085
Крючок PRIMANOVA на стекло S-образный пластик белый
99. – за шт
– за шт
Артикул: 420007389
Крючок Kleber Home Цветок желтый
99.– за шт
Артикул: 420007388
Крючок Kleber Home Футбол
99.-1000x1000.jpg) – за шт
– за шт
Артикул: 420007387
Крючок Kleber Home Ручки
99.– за шт
Артикул: 420007385
Крючок Kleber Home Жираф
99. – за шт
– за шт
Артикул: 420006969
Крючки Fresh Code Фрукты 2 шт самоклеящиеся сталь
99.– за компл
Артикул: 420008438
Крючки Kleber 3 шт самоклеящиеся пластик прозрачный
109. – за компл
– за компл
Артикул: 420006973
Крючки Fresh Code Губы Усы 2 шт пластик на присоске
109.– за компл
Артикул: 420004866
Крючок Antik Ракушка гелевый желтый на присоске
109. – за шт
– за шт
Артикул: 420008437
Крючки Kleber 5 шт самоклеящиеся пластик белый
119.– за компл
Артикул: 420009180
Силиконовый держатель Kleber Lite запасной
139. – за шт
– за шт
Артикул: 420008439
Планка на 3 крючка Fora хром на присосках
1139.– за шт
Артикул: 420008364
Крючок Gimi Bingo на присоске микс
2 149. – за шт
– за шт
Артикул: 420055941
Крючки Fora 2 шт хром на присоске
1149.– за компл
Артикул: 420008869
Крючки АкваЛиния Уточка 2 шт самоклеящиеся металл микс
159. – за упак
– за упак
Общество С Ограниченной Ответственностью «Диада» (Общество С Ограниченной Ответственностью «Диада»)
| Российская Федерация 643 |
| +7 (4872) 37-39-50 | maildiada@gmail. ru ru |
 01.2013
01.2013Разновидности анкерных креплений
Сегодня существует множество типов анкеров для кладки на вебсайт. Проблема для многих заключается в определении того, какой из них им нужен для выполнения работы. Ниже перечислены некоторые из наиболее распространенных крепежных элементов, встречающихся в области кладки.
Типы анкерных крепежей
· Опускание анкеров с помощью установочного инструмента
Опускание анкера в кладке в основном используется в заливаемом бетоне. Они используются в высокопрочных приложениях путем крепления болта во внутренней резьбе анкера. Они также доступны в катушечной резьбе (более грубая резьба для катушечного резьбового стержня). Некоторые анкеры для кладки имеют выступ, предотвращающий слишком глубокое погружение анкера в бетон.
· Анкеры с лаговым щитом
Бетонный анкер с запаздывающим экраном используется в сочетании с запаздывающим винтом для создания анкера в бетоне. Щиты с запаздыванием состоят из двух частей, и когда винт с запаздыванием забивается в щит, он расширяется, в результате чего в бетоне образуется плотный клин.
Щиты с запаздыванием состоят из двух частей, и когда винт с запаздыванием забивается в щит, он расширяется, в результате чего в бетоне образуется плотный клин.
Анкеры с запаздывающим экраном очень похожи на якорь, но разработаны специально для использования винта с запаздыванием. Для установки винтовых анкеров с запаздыванием также не требуется установочный инструмент.
· Анкерный штифт с приводом молотка
Анкер с приводом от молотка-это небольшой анкер, который в основном используется для крепления фанеры к бетону. Эти якоря очень просты в использовании. У них есть выступ над головкой, что делает его совместимым с отверстиями, которые, возможно, случайно были слишком глубоко загнаны в материал.
· Анкеры поворотного крыла
Шарнирный анкер крыла используется при наличии полой стенки. Это часто встречается, когда для создания стен здания используются шлакоблоки. Они также широко используются в гипсокартоне. Не рекомендуется использовать большой вес на этих анкерах, особенно в гипсокартоне, так как они могут прорвать материал.
· Двойной анкер расширительного щита
Анкеры с двойным экраном расширения используются в основном в кирпиче и блоке. Когда винт вбивается в анкер, он начинает опускаться к середине, что приводит к расширению анкера. Эти якоря только расширяются настолько. Причина этого в том, чтобы предотвратить растрескивание кирпича.
· Анкеры для втулок
Втулочные анкеры довольно просты в использовании и в основном используются в кирпиче или блоке. Их можно использовать в бетоне, но они не считаются такими прочными, как клиновой анкер. Таким образом, для применений с легким и средним удержанием якорь с втулкой является хорошим выбором. Существует два распространенных типа анкеров-втулок. Это привод с гайкой, который обычно используется для дополнительной прочности, и комбинированная плоская головка с крестообразным/щелевым приводом, которая используется, когда требуется заподлицо.
· Клиновые анкерные анкеры
Клиновые анкеры чрезвычайно популярны и являются одним из самых прочных анкеров для удержания. Клиновые анкеры выглядят и функционируют как втулочный анкер, но имеют гораздо меньшую втулку у нижней части якоря.
Клиновые анкеры выглядят и функционируют как втулочный анкер, но имеют гораздо меньшую втулку у нижней части якоря.
Amazon.com | Якорь для напитков L’il Sucker
В настоящее время недоступен.
Мы не знаем, когда и появится ли этот товар в наличии.
| Материал | Неопрен |
| Цвет | военно-морской |
| Марка | Lilsucker |
| Вес предмета | 0. 1 фунт 1 фунт |
| Размеры изделия ДхШхВ | 4,5 х 4,5 х 0,2 дюйма |
- Убедитесь, что это подходит введя номер вашей модели.
- СПАСАТЕЛЬ ПРОЛИВНЫХ НАПИТКОВ — L’il Sucker прикрепляется к бутылкам, банкам, изолированным стаканам, стаканам из нержавеющей стали, а затем быстро и без усилий закрепляет их на месте.
- ПРАКТИЧНО НЕУСТРАИВАЕМЫЙ — сделанный из неопрена, L’il Sucker скользит по дну вашего напитка, банки, бутылки, изолированной чашки, кружки, газировки, пива.Все, что вы не хотите проливать.
- ИСПОЛЬЗУЙТЕ В ЛЮБОМ МЕСТЕ — Прилипает к любой гладкой поверхности, чтобы не пролить и не испортить напиток! Лодка, самолет, автомобиль, рабочая зона, гидроцикл, трактор, стол, ванна и т. Д.
- ЛЕГКО ВКЛЮЧИТЬ, ЛЕГКО ВЫКЛЮЧИТЬ — нажмите на гладкую поверхность, снимается поднятием пальца.

- СОХРАНИТЕ СВОЙ НАПИТОК СЕГОДНЯ — вы будете рады, что сделали это. И ваш напиток тоже!

Забросить якорь
Якорь — это объект, предназначенный для удержания чего-либо на месте.В
термины веб-технологий: это означает строку кода, относящуюся к определенной точке.
внутри веб-страницы, чтобы гиперссылка переходила на нее, как это. В штанговом подъемнике
В терминах якорь — это объект, расположенный вдоль колонны насосно-компрессорных труб и закрепленный на якоре.
к кожуху. Анкеры для НКТ
доступны в разных стилях и размерах; гидравлический и механический. Безусловно
наиболее распространенный якорь — это якорь механического типа, который возник давно и имеет
оказался ценным производственным инструментом. Это известно большинству как стиль Бейкера.
якорь; мы называем наши TAC типа B, для улавливания якорей НКТ.
Это известно большинству как стиль Бейкера.
якорь; мы называем наши TAC типа B, для улавливания якорей НКТ.
A правильно установленный анкер НКТ позволяет натянуть НКТ, которое может значительно уменьшить перемещение насосно-компрессорных труб, вызванное циклической нагрузкой, возникающей при нормальном работа штангового насоса. Уменьшение движения НКТ позволяет насос, чтобы постоянно совершать полный ход и максимизировать эффективность всей системы подъема штанги, а также продления срока службы всего оборудования. В В дополнение к этим преимуществам, он также служит для предотвращения падения трубки на дно колодца должно разойтись.
Выбор размера анкера
До
выберите подходящий размер якоря для вашего приложения, вы должны просто знать
размер НКТ, размер обсадной колонны и вес обсадной колонны.
Процедуры привязки
Настройка
Во время вращения верхний и нижний конусы сближаются, что приводит к смещению скольжения. расширьте наружу, затягивая к кожуху. На нужной глубине поверните
НКТ в направлении установки 5-8 оборотов, пока клинья не коснутся обсадной колонны
и крутящий момент, передаваемый на трубку, становится очевидным.
расширьте наружу, затягивая к кожуху. На нужной глубине поверните
НКТ в направлении установки 5-8 оборотов, пока клинья не коснутся обсадной колонны
и крутящий момент, передаваемый на трубку, становится очевидным.
Освобождение
Ослабьте прилагаемое натяжение к колонне насосно-компрессорных труб и ослабьте нагрузку на колонну.
якорь НКТ. Это позволяет полностью втянуть нижний конус до того, как они
скольжения теряют сцепление с кожухом. Чтобы обеспечить полное освобождение, переместите
трубку вверх и вниз на несколько футов и поверните трубку в направлении выпуска.
Аварийный выпуск
Если обычная процедура освобождения не удалась, поднимите якорь в достаточной степени.
для срезания аварийных штифтов в нижнем конусе.
Аварийная разблокировка = вверх деформация> прочность на сдвиг + вес НКТ
Далее
Соображения
Type B — рабочая лошадка, но у него есть пара недостатков. Забойный песок
твердый материал может попасть в инструмент и стать
сложно работать. По этой причине не рекомендуется размещать внутри или ниже
перфорация ствола скважины. Еще один недостаток — ограничение потока, создаваемое
корпус якоря находится в непосредственной близости от внутреннего диаметра обсадной колонны.Чтобы решить оба
из этих вопросов мы разработали Slimhole TAC. Slimhole TAC имеет конический конец
соединения, более тонкий профиль корпуса, а также вся сила и жесткость
Тип Б.
По этой причине не рекомендуется размещать внутри или ниже
перфорация ствола скважины. Еще один недостаток — ограничение потока, создаваемое
корпус якоря находится в непосредственной близости от внутреннего диаметра обсадной колонны.Чтобы решить оба
из этих вопросов мы разработали Slimhole TAC. Slimhole TAC имеет конический конец
соединения, более тонкий профиль корпуса, а также вся сила и жесткость
Тип Б.
Ознакомьтесь с нашей статьей на якорных ловителях НКТ или обратитесь в техническую команду для консультации.
Инженерный подход к проектированию газовых анкеров | Симпозиум SPE по нефти и газу в Оклахома-Сити / Симпозиум по добыче и эксплуатации
Аннотация
Свободный газ является наиболее частой причиной низкого КПД насосов в штанговых насосных скважинах.Установка газового якоря на днище скважинного насоса — метод, используемый для решения этой проблемы. В данной статье описана усовершенствованная конструкция газового якоря для насосных штанговых скважин с проблемами газа. Описана компьютерная программа, которая поможет в проектировании системы газового якоря и которая оценивает перепады давления для определения перепадов давления для определения эффективности газового якоря.
Описана компьютерная программа, которая поможет в проектировании системы газового якоря и которая оценивает перепады давления для определения перепадов давления для определения эффективности газового якоря.
Основными параметрами конструкции газового якоря являются скорость газового пузыря, диаметр бурового якоря, длина погружной трубы и перепады давления, связанные с системой газового якоря.Сделана проверка практических правил, использовавшихся в прошлом для проектирования газовых якорей. Скорость газового пузыря 0,5 фута / сек является допустимым предположением, если плотность жидкости в градусах API превышает 300, поток является турбулентным и температура превышает 100 градусов по Фаренгейту. Представлены принципы работы эффективного газового якоря. с предложениями о том, как инженеры-технологи могут разработать более эффективные газовые якоря.
Введение
КПД насоса КПД насоса Газовые помехи по-прежнему являются одной из основных причин низкого КПД насосов в насосных штанговых скважинах. Свободный газ, попадающий в пространство между ходовым клапаном и стоячим клапаном, снижает объемный КПД насоса, а большие объемы свободного газа, проходящего через насос, будут мешать прохождению через насос, будут мешать нормальному функционированию клапана и уменьшать объемный КПД насоса. Следовательно, внутрискважинное разделение газа и нефти становится желательным для повышения объемного КПД всякий раз, когда скважина должна быть закачана. Чтобы отделить газ от нефти, необходимо заставить масло течь вниз со скоростью, меньшей, чем скорость подъема пузырьков газа.
Свободный газ, попадающий в пространство между ходовым клапаном и стоячим клапаном, снижает объемный КПД насоса, а большие объемы свободного газа, проходящего через насос, будут мешать прохождению через насос, будут мешать нормальному функционированию клапана и уменьшать объемный КПД насоса. Следовательно, внутрискважинное разделение газа и нефти становится желательным для повышения объемного КПД всякий раз, когда скважина должна быть закачана. Чтобы отделить газ от нефти, необходимо заставить масло течь вниз со скоростью, меньшей, чем скорость подъема пузырьков газа.
Если должно быть достигнуто идеальное разделение газа и жидкости, весь газ будет течь вверх по кольцевому пространству между обсадной колонной и насосно-компрессорной трубой и попадет в систему сбора газа в головной части обсадной колонны. Дегазированная жидкость попадает во всасывающий патрубок насоса и поднимается по трубопроводу. Фактическое отделение газа от нефти осуществляется под действием силы тяжести. Пузырьки будут подниматься через масло со скоростью, в основном зависящей от вязкости масла по отношению к вязкости газа.
Установка правильно спроектированной системы газовых якорей на дне скважинного насоса позволит осуществить этот процесс разделения.процесс происходить. P. 71
Биологически вдохновленная мягкая искусственная присоска
J R Soc Interface. 2017 Октябрь; 14 (135): 20170395.
Sina Sareh
1 Design Robotics, Школа дизайна, Королевский колледж искусств, Лондон, Великобритания
Kaspar Althoefer
2 Advanced Robotics @ Queen Mary (ARQ), Faculty наук и инженерии, Лондонский университет королевы Марии, Лондон, Великобритания
Мин Ли
3 Институт интеллектуальных измерений и приборостроения, Школа машиностроения, Сианьский университет Цзяотун, Сианьская Народная Республика
Йохан Но
4 Центр исследований робототехники, Департамент информатики, Королевский колледж Лондона, Лондон, Великобритания
Франческа Трамасере
5 Центр микробио-робототехники, Итальянский институт технологий, Понтедера, Италия
6 Лаборатория воздушной робототехники, Департамент аэронавтики, Имперский колледж Лондона, Лондон, Великобритания
Барбара Маццолай
5 Центр f или Micro-BioRobotics, Istituto Italiano di Tecnologia, Pontedera, Italy
Mirko Kovac
6 Лаборатория воздушной робототехники, Департамент аэронавтики, Имперский колледж Лондона, Лондон, Великобритания
1 Design Robotics, Школа дизайна, Королевский Колледж искусств, Лондон, Великобритания
2 Продвинутая робототехника @ Queen Mary (ARQ), факультет науки и инженерии, Лондонский университет Королевы Марии, Лондон, Великобритания
3 Институт интеллектуальных измерений и приборов, Школа Машиностроение, Сианьский университет Цзяотун, Сианьская Народная Республика
4 Центр исследований робототехники, Департамент информатики, Королевский колледж Лондона, Лондон, Великобритания
5 Центр микробиоробототехники, Istituto Italiano di Tecnologia, Понтедера, Италия
6 Лаборатория воздушной робототехники, Департамент аэронавтики, Имперский колледж Лондона, Лондон, Великобритания
Получено 201 7 30 мая; Принята в печать 27 сентября 2017 г.
Опубликовано Королевским обществом. Все права защищены.
Эта статья цитируется в других статьях в PMC.Abstract
В этой статье представлен роботизированный модуль привязки, сенсорный механизм для прикрепления к окружающей среде, который может быть интегрирован в роботов для включения или улучшения различных функций, таких как мобильность робота, сохранение на месте или его способность манипулировать объектами. Корпус анкерного модуля состоит из двух частей с переходом механической жесткости от твердого к мягкому.Твердая часть способна сдерживать вакуумное давление, используемое для приведения в действие, в то время как мягкая часть хорошо подстраивается для создания уплотнения для контактных поверхностей. Модуль интегрирован с одним сенсорным блоком, который использует принцип оптоволоконного зондирования для беспрепятственного измерения близости и тактильной информации для использования при планировании движения робота, а также для измерения степени устойчивости его якоря. В ходе эксперимента к модулю был прикреплен переменный набор физических нагрузок, представляющих вес потенциальных тел роботов, и его способность удерживать якорь была количественно оценена при постоянных и переменных сигналах вакуумного давления.Эксперимент показывает эффективность модуля в количественной оценке состояния жесткости анкера и различении различных физических нагрузок, приложенных к нему. Предлагаемый модуль крепления может использоваться во многих промышленных и медицинских приложениях, где привязка к окружающей среде имеет решающее значение для управления роботом.
В ходе эксперимента к модулю был прикреплен переменный набор физических нагрузок, представляющих вес потенциальных тел роботов, и его способность удерживать якорь была количественно оценена при постоянных и переменных сигналах вакуумного давления.Эксперимент показывает эффективность модуля в количественной оценке состояния жесткости анкера и различении различных физических нагрузок, приложенных к нему. Предлагаемый модуль крепления может использоваться во многих промышленных и медицинских приложениях, где привязка к окружающей среде имеет решающее значение для управления роботом.
Ключевые слова: мягкая робототехника , роботизированный модуль крепления, конструкция с градиентом жесткости, единый сенсорный блок, бесшовное измерение, тактильное восприятие
1.Введение
Сенсорно-физическая система — это интеграция физического процесса с датчиками и вычислениями, позволяющая осуществлять мониторинг или управление процессом. Модуль фиксации робота — это сенсорно-физический механизм прикрепления к окружающей среде. Роботизированные якорные модули, способные поддерживать свое крепление в течение длительного времени, будут неоценимы для широкого спектра промышленных и медицинских применений: крепление к альпинистским роботам для осмотра и очистки огромных стеклянных стен, атомных станций и стальных мостов, сидение в полете. роботы, которые могут обеспечить обзор интересующей области с высоты птичьего полета или манипулировать объектами и прикреплять их к хрупким субстратам, например.г. человеческое тело. Однако часто ухудшение характеристик и отказ механизмов крепления вызывают нежелательное отрывание от контактной поверхности, что указывает на необходимость постоянного контроля прочности якоря во время работы робота. Кроме того, для точного управления роботом требуется информация о контактных поверхностях, расположенных в непосредственной близости от модуля (модулей) крепления робота.
Роботизированные якорные модули, способные поддерживать свое крепление в течение длительного времени, будут неоценимы для широкого спектра промышленных и медицинских применений: крепление к альпинистским роботам для осмотра и очистки огромных стеклянных стен, атомных станций и стальных мостов, сидение в полете. роботы, которые могут обеспечить обзор интересующей области с высоты птичьего полета или манипулировать объектами и прикреплять их к хрупким субстратам, например.г. человеческое тело. Однако часто ухудшение характеристик и отказ механизмов крепления вызывают нежелательное отрывание от контактной поверхности, что указывает на необходимость постоянного контроля прочности якоря во время работы робота. Кроме того, для точного управления роботом требуется информация о контактных поверхностях, расположенных в непосредственной близости от модуля (модулей) крепления робота.
Закрепление в хорошо заземленных конструкциях — это биологически вдохновленный подход для передвижения, контроля жесткости, манипулирования объектами, противостояния потокам жидкости и управления энергией у животных. Одна из наиболее распространенных в природе стратегий получения обратимого прикрепления — использование специального органа, известного как присоска. Такой орган позволяет рыбам, кольчатым червякам, гельминтам и головоногим моллюскам закрепляться на различных субстратах, включая грубые, гибкие и грязные. Этот орган прикрепления демонстрирует эффективность как в наземной, так и в водной среде. У бычков, например blackeye goby Rhinogobiops nicholsii, сросшиеся тазовые плавники образуют дискообразную присоску, которая используется для прикрепления к субстрату или более крупной рыбе [1].У северной морской рыбы, Gobiesox maeandricus , есть липкий диск на брюшной стороне, который позволяет животному прикрепляться как к гладким, так и к очень грубым поверхностям, чтобы противостоять сильным водным течениям [2]. Пиявки, которые встречаются как в наземных, так и в водных средах, характеризуются одними и теми же органами прикрепления, одной передней и одной задней присосками [3–7].
Одна из наиболее распространенных в природе стратегий получения обратимого прикрепления — использование специального органа, известного как присоска. Такой орган позволяет рыбам, кольчатым червякам, гельминтам и головоногим моллюскам закрепляться на различных субстратах, включая грубые, гибкие и грязные. Этот орган прикрепления демонстрирует эффективность как в наземной, так и в водной среде. У бычков, например blackeye goby Rhinogobiops nicholsii, сросшиеся тазовые плавники образуют дискообразную присоску, которая используется для прикрепления к субстрату или более крупной рыбе [1].У северной морской рыбы, Gobiesox maeandricus , есть липкий диск на брюшной стороне, который позволяет животному прикрепляться как к гладким, так и к очень грубым поверхностям, чтобы противостоять сильным водным течениям [2]. Пиявки, которые встречаются как в наземных, так и в водных средах, характеризуются одними и теми же органами прикрепления, одной передней и одной задней присосками [3–7]. Согласованная активация и деактивация присосок позволяет пиявке двигаться направленно. Ленточный червь Taenia solium (паразит кишечника человека) использует четыре присоски вокруг головы, чтобы приблизиться к стенке кишечника, и набор крючков, чтобы закрепиться на ней [8,9].Наиболее заметно, что руки осьминога оснащены одним или двумя рядами присосок [10], которые управляются независимо [11]. Эти сложные органы могут прикрепляться к объектам с разной степенью силы. Сюда входит крепление к идеально гладким поверхностям, а также к поверхностям с определенной шероховатостью [12], где технические присоски обычно выходят из строя [2]. Присоски донных осьминогов могут выполнять множество функций [12], включая передвижение [13], хемотактильное распознавание [14], прикрепление тела к твердым субстратам ( a ), с помощью которых можно противостоять штормовым нагонам и волнам [12,15,17] , а также хватание и манипулирование небольшими предметами (даже мягкими и тонкими предметами, такими как их яичные капсулы) [12,16], как можно понять из b .
Согласованная активация и деактивация присосок позволяет пиявке двигаться направленно. Ленточный червь Taenia solium (паразит кишечника человека) использует четыре присоски вокруг головы, чтобы приблизиться к стенке кишечника, и набор крючков, чтобы закрепиться на ней [8,9].Наиболее заметно, что руки осьминога оснащены одним или двумя рядами присосок [10], которые управляются независимо [11]. Эти сложные органы могут прикрепляться к объектам с разной степенью силы. Сюда входит крепление к идеально гладким поверхностям, а также к поверхностям с определенной шероховатостью [12], где технические присоски обычно выходят из строя [2]. Присоски донных осьминогов могут выполнять множество функций [12], включая передвижение [13], хемотактильное распознавание [14], прикрепление тела к твердым субстратам ( a ), с помощью которых можно противостоять штормовым нагонам и волнам [12,15,17] , а также хватание и манипулирование небольшими предметами (даже мягкими и тонкими предметами, такими как их яичные капсулы) [12,16], как можно понять из b .
Осьминоги используют ряды сенсорных присосок, чтобы прикрепляться к объектам с различной степенью силы. Это включает в себя использование присосок ( a ) для крепления к твердым предметам, таким как камни, чтобы выдерживать штормовые нагоны и волны [15], а также ( b ) манипулирование хрупкими или мягкими предметами, такими как яйцо осьминога. капсулы [15]. (Воспроизведено под лицензией Creative Commons Attribution License из [16].) (Онлайн-версия в цвете.)
В живых организмах природа выработала комбинированные способности воспринимать местоположение приближающихся объектов и прикладывать силы после взаимодействия с ними.Например, у большой коричневой летучей мыши Eptesicus fuscus звуковые волны и эхо используются для оценки их расстояния от приближающихся объектов, метод, известный как эхолокация. Прикоснувшись к объекту, животное полагается на тактильную информацию, предоставляемую ячейками Меркеля 1 внутри его крыльев [18,19]. Эти два режима восприятия аналогичны близости и тактильному восприятию в роботизированных системах. Поскольку любое прикосновение происходит после приближающегося события, тактильное восприятие и восприятие приближения считаются взаимодополняющими [20], где комбинация обоих способов восприятия обеспечивает непрерывное восприятие от приближающегося события до следующего события прикосновения.В роботизированных системах привязки тактильная информация может позволить ранжировать жесткость привязки (ей) к объектам, в то время как информация о близости может помочь в планировании движения робота до события касания.
Эти два режима восприятия аналогичны близости и тактильному восприятию в роботизированных системах. Поскольку любое прикосновение происходит после приближающегося события, тактильное восприятие и восприятие приближения считаются взаимодополняющими [20], где комбинация обоих способов восприятия обеспечивает непрерывное восприятие от приближающегося события до следующего события прикосновения.В роботизированных системах привязки тактильная информация может позволить ранжировать жесткость привязки (ей) к объектам, в то время как информация о близости может помочь в планировании движения робота до события касания.
Биомиметические аспекты присосок осьминогов изучаются давно; морфология и физиология присосок осьминога и возможности биомиметической репликации присосок были исследованы [12,16,21-25], с особым акцентом на переходе от твердого к мягкому в механической жесткости присоски [21-25], а также в соответствующей литературе называется «градиент жесткости» 2 [26,27].
Ряд исследователей предложили пассивные искусственные присоски [25] и приводимые в действие присоски с использованием сплава с памятью формы [28] и исполнительных механизмов из диэлектрического эластомера [29]. Существующая литература по сенсоризации искусственных присосок в основном относится к разработке умных скинов для роботизированных рук, чтобы информировать робота о его взаимодействии с окружающей средой. В связи с этим в [30,31] были предложены тактильные чувствительные элементы на основе композитных материалов с квантовым туннелированием (QTC) и проводящего текстиля.Однако чувствительность прототипа падает при увеличении площади QTC таблетки 3 [30]. В другой попытке тонкий слой силикона с отверстием в центре был зажат между двумя листами Electrolycra и встроен под искусственную присоску для измерения тактильных сил сжатия [31]. В этой статье мы используем предыдущую работу по градиенту жесткости [26,27] конструкции присосок осьминога [25] и объединяем ее с одним сенсорным блоком, который может беспрепятственно измерять как тактильную информацию, так и информацию о близости.
2. Материал и методы
2.1. Биоинспектированная конструкция модуля крепления с градиентом жесткости
Механическая конструкция модуля крепления основана на биологии осьминога-присоски, описанной в a, b . Присоска осьминога состоит из двух функциональных частей, соединенных через сужающее отверстие ( b ): воронкообразной части , внешней воронкообразной части присоски и вертлужной впадины, внутренней полой части. Когда присоска прикрепляется к произвольной поверхности, т.е.г. В камне воронка адаптирует свою форму к этой поверхности, создавая уплотнение, и уменьшает свою толщину за счет сокращения радиальных мышц, тем самым увеличивая прикрепление к поверхности. Следовательно, сокращение лучевых мышц вертлужной впадины [12] снижает давление внутри присоски и вызывает прикрепление [16,21-25]. Фактически, поскольку вода является несжимаемой средой, сокращение вертлужных мышц вызывает напряжение воды внутри присоски, что приводит к снижению внутреннего давления.Чем выше уровень сокращения мышц в вертлужной впадине, тем выше разница давления, что приводит к более прочному прикреплению.
Обзор методологии биоинспирированного дизайна и реализации модуля привязки. ( a ) Присоска осьминога, вид сверху с канавками на поверхности инфундибулярной части. Эти радиальные канавки не только позволяют передавать давление, создаваемое в вертлужной впадине, почти на всю поверхность раздела присоска-субстрат, тем самым увеличивая прочность анкера, но также облегчают процесс отсоединения.( b ) Поперечный разрез присоски, показывающий ее биологическое строение. ( c ) САПР проектирование внутренней части пресс-форм без пазовых конструкций. Обратите внимание, что прямой стержень в CAD-модели пресс-формы создает канал для оптического волокна, через которое будет проходить на более позднем этапе. ( d ) САПР проектирование внутренней детали с учетом радиальных канавок в естественных присосках (количество канавок = 12, глубина и ширина канавок = 500 мкм). ( e ) Внешняя часть пресс-формы.( f ) CAD-дизайн анкерного модуля с инфундибулярной частью (синий), вертлужной частью (красный) и жестким основанием, создающим стабильную платформу для тестирования (серебро). ( г ) Моделирование FEA Abaqus моделирует вакуумное давление внутри анкерного модуля как равномерно распределенную нагрузку давления. ( h ) Изготовленный анкерный модуль, имеющий градиент жесткости в своей механической структуре, удерживается по касательной к контактной поверхности (вход вакуума и датчик: выключены).( i , j ) Постепенное прикрепление к контактной поверхности (вакуумный вход и датчик: вкл.). (Онлайн-версия в цвете.)
В [21–25] были подробно исследованы структура и механические свойства естественной присоски, и был заключен ряд принципов для создания искусственной присоски с помощью биоинспирации. Чтобы имитировать гибкость воронки, эта часть должна быть изготовлена из мягкого и липкого материала. Точно так же искусственная вертлужная впадина должна быть изготовлена из более эластичного и более жесткого материала по сравнению с воронкой.Для повышения эффективности искусственной присоски в процессах прикрепления и отсоединения при биоинспирированном дизайне искусственного воронки следует также учитывать бороздки на поверхности естественной воронки ( a ). Радиальные канавки создают каналы для направления давления, создаваемого в вертлужной впадине, почти на всю поверхность раздела между присоской и контактной поверхностью, чтобы обеспечить более прочное прикрепление и более быстрое отсоединение. Следовательно, градиент механической жесткости и соответствующие каналы для передачи давления вертлужной впадины на границу раздела присоска-субстрат являются центральными в механической конструкции модуля фиксации, как искусственной присоски, и рассматривались для биоинспирированной репликации в рамках этого исследования.
В соответствии с этими целями проектирования, мы разработали набор 3D-моделей в САПР пресс-форм, необходимых для литья материалов и изготовления анкерного модуля, представленных в c – e ; формы состоят из внутреннего сердечника, который формирует внутренние полости и радиальные канавки, и внешнего корпуса. В этом исследовании радиальные канавки имеют ширину 500 мкм и глубину 500 мкм и равномерно распределены (каждые 30 °). Каждая канавка имеет треугольную форму, радиально расходящуюся от отверстия отверстия к краю воронки.Формы были напечатаны на 3D-принтере с использованием машины для быстрого прототипирования. 4
В этом исследовании для изготовления вертлужной впадины и инфундибулярной кости с градиентом жесткости были рассмотрены два типа силиконовых материалов: Ecoflex ® 00–30 и Dragon Skin ® 00–10, 5 . части анкерного модуля (Ecoflex ® 00–30 мягче, чем Dragon Skin ® 0010). Модель Йео [32] была использована для моделирования гиперупругого поведения [33] двух материалов по данным испытаний на одноосное растяжение [34], выраженное как
2.1
, где U — энергия деформации на единицу исходного объема, C i 0 и D i — параметры материала [32], является первым инвариантом девиаторной деформации 6 и J el — коэффициент упругого объема. Чтобы еще больше упростить модель, мы предполагаем несжимаемость двух материалов, и, следовательно, вторым членом модели Йео (уравнение (2.1)) можно пренебречь.Поэтому для моделирования используется
2.2
. Соответствующие параметры материала перечислены в [34].
Таблица 1.
Параметры материалов Ecoflex ® 00–30 и Dragon Skin ® 00–10 [24,34].
| параметры упругости | массовая плотность (т / мм 3 ) | модуль упругости (МПа) | гиперэластичность | коэффициент Пуассона | C 10 | 20 (МПа) | C 30 (МПа) | | |
|---|---|---|---|---|---|---|---|---|
| Ecoflex ® 00–30 | 1.07 × 10 −9 | 34,8 ± 2,7 | Данные одноосных испытаний | 0,4 | 7,61 × 10 −3 | 2,42 × 10 −4 | −6,2 × 10 −7 | |
| Кожа дракона ® 00–10 | 1,07 × 10 −9 | 129,0 ± 9,7 | Данные одноосного испытания | 0,4 | 36 × 10 −3 | 2,58 × 10 −5 | −5,6 × 10 −7 |
CAD-части модуля крепления были импортированы в Abaqus FEA 7 в виде однородных твердых элементов.Затем был проведен ряд моделирования методом конечных элементов, как описано в §3, для оценки характеристик прикрепления и отсоединения модуля анкеровки при использовании архитектуры мягкого и твердого градиента жесткости материала. Импортированная модель CAD ( f ) была дискретизирована на твердые шестигранные линейные уменьшенные интегрирующие элементы (тип сетки Abaqus C3D8R) с размером ячейки 2,5 мм. Анкерный модуль был смоделирован как сборка частей инфундибулюма и вертлужной впадины, и ограничение типа «стяжка» (ограничение предотвращает любые относительные движения между двумя частями сборки) использовалось для соединения этих двух частей.Обратите внимание, что как часть модели, плоская пластина ( г ), представляющая поверхность, на которую должна крепиться система крепления, создается и помещается над модулем крепления (модуль Юнга пластины составляет 1100 МПа). Верхняя поверхность пластины фиксировалась во время моделирования. Вакуумное давление внутри анкерного модуля моделировалось с использованием равномерно распределенной нагрузки давления. Модель FEA использовалась для моделирования нагрузочных возможностей и деформации анкерного модуля при переменном давлении вакуума. h – j показывает прототип модуля крепления со встроенной сенсорной системой, поясняемый в следующем разделе, который проходит процесс крепления.
2.2. Сенсорно-физическая конструкция модуля: бесшовное измерение тактильной информации и информации о близости
Взаимодополняющая роль датчиков приближения и тактильных датчиков в роботизированном обнаружении привела к ряду попыток объединить обе возможности в едином сенсорном блоке для минимизации общего оборудования и удовлетворять требованиям (например,г. вес и размер) для интеграции в более широкий спектр робототехнических систем, включая легкие летающие роботы и компактные манипуляторы для работы в ограниченном пространстве. На сегодняшний день яркими примерами таких сенсорных систем являются емкостные тактильные датчики приближения на основе серебряных нанопроволок и полимерной пленки [35] и углеродных микрокатушек [36]. Поскольку первый использует один и тот же емкостной диапазон как для приближения, так и для тактильного восприятия, датчик не может различать статическое приближение и тактильные входы.Последний требует схемы управления для переключения между двумя режимами работы.
Волоконно-оптические системы с диффузным отражением [37–40], в которых используется принцип определения модуляции интенсивности света [37–43], потенциально могут предоставить лучшие возможности для непрерывного измерения тактильной информации и информации о близости в практических приложениях. Бесконтактный характер принципа измерения позволяет выполнять измерения независимо от геометрии воплощающей конструкции и системы приведения в действие, и, следовательно, не требуется никаких действий для перехода между двумя режимами измерения.Кроме того, простая и независимая структура этих датчиков делает их более прочными и надежными для работы в течение длительного периода времени. Волоконно-оптические датчики не пропускают электрический ток в месте обнаружения, что делает их изначально безопасными для интеграции в модули крепления, которые потенциально могут быть прикреплены к уязвимым поверхностям или телу человека. Более того, они подходят для интеграции в мягкие робототехнические системы, поскольку гибкость оптического волокна позволяет сохранить присущую этому классу роботов мягкость [39–41].
Сенсорная система нашего модуля фиксации использует модуляцию интенсивности света, как описано в a , происходящую между отражающим волоконным блоком FU-69U 9 , который встроен в искусственную вертлужную впадину ( b ), и контактная поверхность. В этой статье расстояние a между концом оптического волокна и контактной поверхностью, указанное в b , называется «длиной анкера». Во время крепления, когда длина анкера уменьшается, интенсивность отраженного света увеличивается ( c ), указывая на более прочное крепление.Волоконно-оптический датчик FS-N11MN от того же производителя оптики использовался для преобразования интенсивности света в информацию о напряжении, которая впоследствии была получена картой сбора данных NI USB 6211 10 . Хотя сенсорная система не защищена от внешнего света, она очень устойчива к окружающему свету (не подвержена воздействию до 30 000 люкс) [44]. Устройство датчика может измерять длину анкера в пределах 40 мм от конца оптического волокна [44]. Обратите внимание, что наша работа над сенсорной системой была направлена на воспроизведение двух биологических функций (близость и тактильное восприятие) с использованием одной сенсорной единицы, а не на копирование принципов биологического восприятия.
( a ) Конфигурация диффузно-отражающей волоконно-оптической системы, состоящая из модуля источника света и детектора (волоконно-оптический датчик FS-N11MN) и четырехжильного оптоволоконного блока. ( b ) Определение длины анкера α . ( c ) Бесшовная калибровка сенсорной системы модуля крепления; модуль интегрирован с моторизованной линейной направляющей и специализированным программным обеспечением для управления двигателем 8 , которое позволяет автоматически запускать повторные эксперименты; обратите внимание на изменение показаний датчика, когда модуль крепления отодвигается от контактной поверхности.( d ) Описание экспериментальной установки и параметров. ( e ) Близость и тактильные области калибровочной кривой для деревянных и алюминиевых материалов, как описано уравнением (2.3). (Онлайн-версия в цвете.)
Для калибровки отдельного сенсорного блока анкерного модуля модуль был интегрирован в настраиваемое калибровочное устройство с помощью монтажного вала ( d ). Калибровочное устройство состоит из моторизованной линейной направляющей и контроллера движения, который позволяет изменять длину анкера автоматическим и повторяемым образом в диапазоне от 2 до 40 мм, в то время как выходное напряжение оптоволоконного датчика FS-N11MN регистрируется, что можно определить по с, д .Датчик откалиброван для двух различных контактных поверхностей, изготовленных из алюминия (отделка фрезерованием) и дерева (отделка дубом), а калибровочные кривые представлены в и .
Длину анкера можно рассчитать с помощью
2,3
, где v — аналоговое выходное напряжение, полученное от FS-N11MN и p 1 , q 1 , q 2 и q 3 — это калибровочные коэффициенты, которые описаны в.Следует отметить, что уравнение (2.3) представляет собой рациональное соответствие данным о длине якоря напряжения, полученным в Matlab. 11
Таблица 2.
Коэффициенты аппроксимации кривой для алюминия и древесины.
| коэффициенты | p 1 | q 1 | q 2 | q 3| q 9 903 902 9002 90024 | −5,179 | 13,72 | −10,05 | |
|---|---|---|---|---|---|---|---|---|
| древесина | 49,99 | −7,313 | 22,11 | −16,99 |
2.3. Изготовление, интеграция мехатроники и тестирование модуля анкеровки
Для изготовления модуля анкеровки форма, показанная на e , была помещена вверх дном и залита в нее материал Ecoflex ® 00–30 до полного покрытия. области воронки, а затем нагревают при 55 ° C в течение 20 минут в духовке.Затем в форму был добавлен материал Dragon Skin ® 00–10 до достижения кровли вертлужной впадины толщиной три миллиметра (следует отметить, что оба силиконовых материала были дегазированы внутри вакуумной камеры перед процессом литья). На этом этапе четырехжильное оптическое волокно FU-69U и вакуумная трубка диаметром 2 мм (внешний диаметр) были встроены внутрь вертлужной впадины, как показано на рисунке, и заготовка была оставлена при комнатной температуре (примерно 25 ° C) для последующего использования. вылечил за ночь. Затем к нижней части модуля крепления была приклеена пластиковая основа, напечатанная на 3D-принтере, чтобы гарантировать, что положение оптического волокна остается неизменным во время последовательных экспериментов, обеспечивая стабильную платформу для экспериментов.
Мехатронная конфигурация сенсорно-физического модуля привязки. Модуль имеет конструкцию градиента жесткости в своей механической конструкции и приводится в действие с помощью вакуумного насоса Mastercool
через регулятор вакуума ITV0090-2BN-Q. Система могла беспрепятственно измерять тактильную информацию и информацию о близости с помощью одного сенсорного блока, состоящего из четырехжильного оптоволоконного блока FU-69U и оптоволоконного датчика FS-N11MN. (Онлайн-версия в цвете.)Общая конфигурация анкерного модуля состояла из мягких искусственных воронок и частей вертлужной впадины, интегрированных с четырехжильным оптическим волокном и трубкой подачи вакуума, как показано на рис.Вакуумное давление подавалось вакуумным насосом Mastercool
через вакуумный регулятор ITV0090-2BN-Q со встроенным датчиком давления. Аналоговые значения напряжения, соответствующие вакуумному давлению и интенсивности света, передавались в компьютер через систему сбора данных.Для сравнения с естественным аналогом стоит отметить, что на уровне моря осьминог может создавать перепад давления от 100 до 200 кПа с помощью присоски. Однако животное способно создавать более высокие перепады давления на больших глубинах, где давление воды выше [12].Когда анкерный модуль работает на воздухе, перепад давления не может превышать предел в 1 бар (100 кПа), поскольку абсолютное отрицательное давление невозможно, за исключением твердых и жидких веществ [45]. Отметим, что в данном исследовании все эксперименты проводились на воздухе.
3. Результаты и обсуждение
3.1. Характеристика максимальной грузоподъемности
Чтобы оценить возможности срабатывания анкерного модуля, его максимальную грузоподъемность при различных значениях входного давления вакуума в диапазоне от -0.Было определено количество от 1 бар до -0,5 бар. Результаты соответствующего моделирования методом конечных элементов и экспериментальные результаты предполагают, что анкер может выдерживать физические нагрузки примерно до 2 Н ( a ). В другом эксперименте срабатывание анкерного модуля с фиксированным общим весом 1,09 Н было зафиксировано с помощью видеокамеры высокого разрешения. Длина анкера для различных значений входного давления вакуума рассчитывалась по видеоизображениям и сравнивалась с соответствующими результатами моделирования.Эксперимент был повторен пять раз, и результаты нанесены на график b , что указывает на максимальную ошибку 27% между смоделированными и экспериментальными значениями длины анкера. Ошибка может быть в основном из-за возможных неточностей в данных одноосных испытаний; все образцы, использованные для одноосного испытания в [34], и наш экспериментальный прототип были изготовлены с помощью аналогичных процессов ручного литья. Следовательно, могут быть некоторые различия в свойствах материалов из-за качества ручной обработки.Другие источники ошибки могут быть связаны с гиперупругой моделью, используемой для моделирования, а также с экспериментальными измерениями.
Конечно-элементное моделирование и соответствующие экспериментальные результаты для крепления к деревянной поверхности. ( a ) Грузоподъемность в зависимости от давления; максимальная физическая нагрузка, которая может удерживать модуль крепления на поверхности при различных давлениях, была смоделирована в Abaqus FEA и проведена физическая проверка. Обратите внимание, что на вставке показана установка для добавления физической нагрузки к модулю, когда он был вертикально прикреплен к поверхности.( b ) Зависимость длины анкера от давления; результаты моделирования методом конечных элементов сравнивались с соответствующими данными, извлеченными из изображений с камеры. (Онлайн-версия в цвете.)
3.2. Динамика реверсивной системы анкеровки и жесткости анкера
Была оценена способность сенсорной системы количественно определять стойкость анкера при различных условиях физической нагрузки. Чтобы иметь возможность последовательно выполнять несколько циклов экспериментов, мы определили минимальное значение для входного сигнала давления, которое гарантирует, что система крепления будет прикреплена к деревянной поверхности в течение всего эксперимента, когда дополнительные грузы были сложены друг с другом. в верхней части существующих нагрузок (см. вставку в и ), и выходной сигнал датчика был записан.Это минимальное значение составляло -0,1 бар, которое было определено экспериментом в §3.1 и a . Следовательно, к анкерному модулю ( a ) был приложен обратный пилообразный вакуумный ввод с соответствующими максимальными и минимальными значениями -1 и -0,1 бар. Вес модуля крепления постепенно увеличивался путем добавления дополнительных стандартных калибровочных грузов с прорезями в нижнюю часть модуля для достижения общего веса Вт = {0,69, 0,89, 1,09} Н (в последовательных экспериментах) и сигналов датчиков ( b ) были проанализированы в соответствии с визуальной информацией с изображений с камеры.В c соответствующие длины анкеров были рассчитаны из уравнения (2.3), и было указано соответствие ключевым последовательностям отсоединения (1–4, d ) при физической нагрузке 1,09 Н. Обратите внимание, что e показывает полное отсоединение, если мы уменьшим сигнал вакуума до 0. Из значений b можно понять, что показания датчика начинают уменьшаться с более высокого значения 4,67 В (представляющего надежный якорь) до достижения минимального значения 1,77 В (представляющего уязвимый якорь) в процессе отсоединения.На изображениях с камеры видно небольшое колебание модуля крепления вокруг точки крепления во время процесса отсоединения из-за крутящего момента, создаваемого добавленными грузами в нижней части модуля; это может объяснить временное падение напряжения считывания в b до минимального значения кривой 1,77 В перед установкой на более высокое значение 2,08 В, например для физической нагрузки 1,09 Н (обратите внимание, что поворот модуля крепления вокруг точки крепления увеличивает расстояние между концом оптического волокна и контактной поверхностью и, следовательно, снижает сигнал датчика).
( a ) Входной сигнал обратной пилообразной формы с максимальным и минимальным значениями -1 и -0,1 бар (этот сигнал является частью полного обратного пилообразного сигнала, показанного на вставке с периодом 50 с). Следует отметить, что согласно данным, давление вакуума -0,1 бар является порогом для полного отсоединения физических нагрузок ниже 1,4 Н. Поэтому мы сохранили минимальное значение пилообразного сигнала выше -0,1 бар, чтобы можно было последовательно проводить повторные эксперименты. ( b ) Соответствующие сигналы датчиков; обратите внимание, что добавленная физическая нагрузка на нижнюю часть модуля анкеровки создает крутящий момент вокруг точки контакта во время отсоединения и, следовательно, изменение сигнала измерения (см. вставку в a для настройки, используемой для добавления физической нагрузки к модуль).( c ) Длина анкера при различных условиях нагрузки во время отсоединения. ( d ) Соответствие ключевым последовательностям отсоединения, с 1 по 4, сенсорно-физического модуля фиксации с физической нагрузкой 1,09 Н. ( e ) Последовательность 5 показывает конфигурацию модуля привязки в момент отслоение (когда минимальная величина вакуумного давления была снижена до 0). (Онлайн-версия в цвете.)
Воспроизводимость измеренных значений определяется как [41]
3.1
и рассчитана для длины анкера (за пять циклов срабатывания при обратном пилообразном сигнале) как 93,7%. Стандартное отклонение рассчитывается в Matlab как 0,56 мм, а диапазон тактильного восприятия установлен на 9 мм.
Экспериментальные результаты, представленные в, показывают, что большие нагрузки на присоску требуют более высоких уровней приложенного вакуумного давления для поддержания стабильного крепления; это можно увидеть в том, что, имея известные значения сигнала измерения и входного сигнала вакуума, модуль крепления может различать различные значения физической нагрузки.Однако слепой осьминог не может различать два объекта, различающиеся только по весу, с помощью присосок [46]; способность распознавания веса модуля якоря может рассматриваться как пример того, как роботизированные системы с биоинспекцией превосходят их биологические аналоги [47, 48].
4. Заключение
Мы представляем сенсорно-физический модуль фиксации со следующими мехатронными конфигурациями и конфигурациями материалов: (1) конструкция с градиентом жесткости в механической структуре частей искусственного воронки и вертлужной впадины для использования мягкости конформации соприкасающихся поверхностей при сохранении жизнеспособности и механической прочности модуля и (2) единого сенсорного блока на основе волоконной оптики, интегрированной в механическую структуру и откалиброванной для бесшовного определения близости и тактильного взаимодействия модуля крепления с окружающей средой.В то время как тактильная информация может позволить оценить устойчивость якоря (ей) к объектам, информация о близости используется для прогнозирования приближающихся объектов для планирования движения робота до события касания. Чтобы проверить эффективность предложенной системы крепления, к модулю крепления был прикреплен переменный набор грузов, представляющий потенциальное тело робота, и его способность удерживать якорь была оценена с помощью бортовой сенсорной системы в постоянном и переменном вакууме. сигналы давления.Показано, что сенсорно-физический модуль фиксации способен количественно определять степень устойчивости якоря и различать различные количества приложенных к нему физических нагрузок.
Состав из мягких материалов является отличительной особенностью этого модуля крепления, в отличие от более традиционных механизмов крепления с использованием магнитов или штифтов [49]. Предлагаемый модуль хорошо прилегает к поверхностям, к которым он прикрепляется, и может естественным образом разрушиться при столкновении, чтобы избежать повреждения уязвимых оснований.Эта приспосабливаемость и мягкость делают его пригодным для использования в качестве мягкого сенсорно-физического захвата в роботизированных системах захвата и размещения, особенно в системах упаковки пищевых продуктов и лекарств, где жесткий контакт традиционных рабочих органов с доставляемым субстратом часто нежелателен. Более того, модуль может помочь во многих промышленных, медицинских и человеческих приложениях, например хирургическая процедура, при которой фиксирующее устройство должно обеспечивать постепенное прикрепление / отсоединение с характеристиками, которые могут предупреждать оператора, например.г. к хирургу, и дайте ему время среагировать.
Имея известные значения физической нагрузки, вакуумного давления и количества модулей крепления в роботизированной системе, в будущих работах будет рассмотрено дальнейшее развитие этой концепции для создания вычислительных моделей и прототипов предлагаемой концепции крепления для передвижения или манипуляции с несколькими якорями. робототехнические системы, применимые к широкому спектру медицинских и промышленных приложений.
Сноски
1 Клетки Меркеля представляют собой механорецепторы овальной формы, обнаруженные в коже позвоночных и необходимые для точного восприятия прикосновения.
2 Концепция градиента жесткости происходит от естественных организмов, чья жесткость тела меняется с жесткой на мягкую по направлению к внешнему телу, например, структура костей, мышц и кожи человеческого тела.
3 Таблетки QTC, наиболее часто используемый тип QTC, представляют собой чувствительные к давлению переменные резисторы, которые можно использовать в приложениях для измерения силы / тактильного ощущения.
4 Формы были разработаны в программе 3D CAD SolidWorks (SolidWorks Corp.) и напечатаны на 3D-принтере с использованием производственной системы Project HD 3000 3D.
5 Smooth-On Inc., США.
6 где — девиаторное растяжение, λ i — главное растяжение, а Дж, — общий объемный коэффициент [32].
7 Dassault Systèmes, Франция.
8 Был разработан специальный код C # для синхронного получения положения двигателя и значений чувствительного сигнала от оптоволоконного датчика FS-N11MN через NI-USB 6211 DAQ.
9 Пучок оптического волокна с четырьмя жилами производства Keyence ™, США.
10 National Instruments ™, США.
11 MathWorks, Inc., США.
Доступность данных
В этой статье нет дополнительных данных.
Вклад авторов
С.С. и М.Л. задумал исследование. П.С., Ю.Н. и F.T. внесла свой вклад в разработку механической, электронной и биологической конструкции анкерной системы. М.Л. способствовал соответствующему моделированию.С.С. и М.Л. разработан прототип системы крепления и проведены эксперименты. К.А., Б.М. и М.К. посоветовал работу, а С.С. написал статью.
Конкурирующие интересы
Авторы заявляют об отсутствии конфликта интересов.
Финансирование
Эта работа была частично поддержана Седьмой рамочной программой Европейской комиссии в рамках грантового соглашения 287728 в рамках проекта ЕС STIFF-FLOP.
Ссылки
1. Maie T., Schoenfuss HL, Blob RW.2012 г. Характеристики и масштабирование новой конструкции опорно-двигательного аппарата: адгезионная способность лазающих бычков. J. Exp. Биол. 215, 3925–3936. (10.1242 / jeb.072967) [PubMed] [CrossRef] [Google Scholar] 2. Wainwright DK, Kleinteich T, Kleinteich A, Gorb SN, Summers AP. 2013. Плотно прилипает: адгезия при присасывании на неровных поверхностях у северных морских рыб. Биол. Lett. 9, 20130234 (10.1098 / rsbl.2013.0234) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 3. Фарнези Р.М., Маринелли М., Тей С., Вагнетти Д.1981 г. Морфологические и ультраструктурные аспекты Branchiobdella pentodonta Whit. (Annelida, Oligochaeta) присоски. J. Morphol. 170, 195–205. (10.1002 / jmor.1051700206) [PubMed] [CrossRef] [Google Scholar] 4. Стерн-Томлинсон В., Нусбаум депутат, Перес Л. Е., Кристан В. Б.. 1986 г. Кинематическое исследование ползания пиявки, Hirudo medicinalis . J. Comp. Physiol. А 158, 593–603. (10.1007 / bf00603803) [PubMed] [CrossRef] [Google Scholar] 5. Фэн Х., Нинли К., Вэньхао Д. 2015 г. Экспериментальное исследование морфологии и механизма прикрепления задних присосок пиявки.PLoS ONE 10, e0140776 (10.1371 / journal.pone.0140776) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 6. Камповски Т., Эберхард Л., Галленмюллер Ф., Спек Т., Поппинга С. 2016 г. Функциональная морфология присосных дисков и характеристики прикрепления средиземноморской медицинской пиявки ( Hirudo verbana Carena). J. R. Soc. Интерфейс 13, 20160096 (10.1098 / rsif.2016.0096) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 7. Тесслер М., Баррио А., Борда Е., Руд-Голдман Р., Хилл М., Сиддалл М.Э.2016 г. Описание мягкотелого беспозвоночного с помощью микрокомпьютерной томографии и ревизии рода Chtonobdella (Hirudinea: Haemadipsidae). Zool. Scr. 45, 552–565. (10.1111 / zsc.12165) [CrossRef] [Google Scholar] 8. Баадер А.П. 1997 г. Межнейронные и двигательные паттерны при ползании полуинтактных пиявок. J. Exp. Биол. 200, 1369–1381. [PubMed] [Google Scholar] 9. Уиллмс К. 2008 г. Морфология и биохимия свиного цепня, Taenia solium . Curr. Вершина.Med. Chem. 8, 375–382. (10.2174 / 1568026087837) [PubMed] [CrossRef] [Google Scholar] 10. Хохберг Ф.Г., Никсон М, Толл РБ. 1992 г. Order OCTOPODA leach, 1818. У личинок и молодых головоногих моллюсков: руководство по их идентификации (ред. Суини MJ, Roper CFE, Mangold KM, Clarke MR, Boletzky SV), p. 213 Вашингтон, округ Колумбия: Пресса Смитсоновского института. [Google Scholar] 11. Grasso FW. 2008 г. Координация присоски-рука осьминога при захвате и манипуляциях. Являюсь. Малакол. Бык. 24, 13–23. (10.4003 / 0740-2783-24.1.13) [CrossRef] [Google Scholar] 12. Кир WM, Смит AM. 2002 г. Строение и адгезивный механизм присосок осьминогов. Интегр. Комп. Биол. 42, 1146–1153. (10.1093 / icb / 42.6.1146) [PubMed] [CrossRef] [Google Scholar] 13. Хаффард CL. 2006 г. Передвижение Abdopus aculeatus (Cephalopoda: Octopodidae): переход на границу между первичной и вторичной защитами. J. Exp. Биол. 209, 3697–3707. (10.1242 / jeb.02435) [PubMed] [CrossRef] [Google Scholar] 14. Уэллс MJ. 1978 г. Осьминог: физиология и поведение развитого беспозвоночного, с.417 Лондон, Великобритания: Chapman & Hall. [Google Scholar] 15. Грассо Ф.В., Сетлур П. 2007 г. Вдохновение, моделирование и дизайн интеллектуальных роботов-манипуляторов на основе приводного механизма присоски головоногих моллюсков. Биоинспир. Биомим. 2, S170 – S181. (10.1088 / 1748-3182 / 2/4 / S06) [PubMed] [CrossRef] [Google Scholar] 16. Робисон Б., Сейбель Б., Дражен Дж. 2014 г. Глубоководный осьминог ( Graneledone boreopacifica ) проводит самый длительный из известных периодов высиживания яиц среди всех животных. PLoS ONE 9, e103437 (10.1371 / journal.pone.0103437) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 17. Паккард А. 1988 г. Кожа головоногих моллюсков (колеоидов): общие и специальные приспособления. В «Моллюск: форма и функция» (редакторы Trueman ER, Clarke MR), стр. 37–67. Сан-Диего, Калифорния: Academic Press. [Google Scholar] 18. Люмельский В.Ю. 2005 г. Ощущение, интеллект, движение: как роботы и люди движутся в неструктурированном мире, стр. 399–401. Хобокен, Нью-Джерси: Джон Вили. [Google Scholar] 19. Маршалл К.Л., Чада М., деСуза Л.А., Стербинг-Д’Анджело С.Дж., Мосс К.Ф., Лампкин Е.А.2015 г. Соматосенсорные субстраты управления полетом летучих мышей. Cell Rep. 11, 851–858. (10.1016 / j.celrep.2015.04.001) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 20. Верл А., Алин Альбу-Шеффер А., Брок О., Раатц А. 2015 г. Мягкая робототехника: перенос теории в приложение, стр. 62–63. Берлин, Германия: Springer. [Google Scholar] 21. Tramacere F, Pugno NM, Kuba MJ, Mazzolai B. 2015 г. Раскрытие морфологии вертлужной впадины у присосок осьминога и ее роли в прикреплении. Интерфейс Фокус 5, 20140050 (10.1098 / rsfs.2014.0050) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 22. Tramacere F, Appel E, Mazzolai B, Gorb SN. 2014 г. Волосатые присоски: микроструктура поверхности и ее возможное функциональное значение у присоски Octopus vulgaris . Beilstein J. Nanotechnol. 5, 561–565. (10.3762 / bjnano.5.66) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 23. Tramacere F, Beccai L, Kuba M, Gozzi A, Bifone A, Mazzolai B. 2013. Морфология и механизм прикрепления присосок Octopus vulgaris .PLoS ONE 8, e65074 (10.1371 / journal.pone.0065074) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 24. Трамакере Ф., Ковалев А, Клейнтайх Т, Горб С.Н., Маццолай Б. 2014 г. Строение и механические свойства присосок Octopus vulgaris . J. R. Soc. Интерфейс 11, 20130816 (10.1098 / rsif.2013.0816) [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 25. Tramacere F, Follador M, Pugno NM, Mazzolai B. 2015 г. Присоски, похожие на осьминога: от натуральных до искусственных растворов. Биоинспир.Биомим. 10, 035004 (10.1088 / 1748-3190 / 10/3/035004) [PubMed] [CrossRef] [Google Scholar] 26. Бартлетт Н.В., Толли М.Т., Овервелде Дж. Т. Б., Уивер Дж. К., Мосадег Б., Бертольди К., Уайтсайдс Г. М., Вуд Р. Дж.. 2015 г. Напечатанный на 3D-принтере мягкий робот с функциональной классификацией, работающий от горения. Наука 349, 161–165. (10.1126 / science.aab0129) [PubMed] [CrossRef] [Google Scholar] 27. Саре С., Цзян А., Фарагассо А., Но Й, Нанаяккара Т., Дасгупта П., Сеневиратне Л., Вюрдеманн Х., Алтофер К. 2014 г. Гильза тактильного датчика на основе биологических материалов для хирургических мягких манипуляторов.В Proc. IEEE Int. Конф. по робототехнике и автоматизации, Гонконг, Китай, 31 мая – 7 июня 2014 г., стр. 1454–1459. (10.1109 / ICRA.2014.63) [CrossRef] [Google Scholar] 28. Ху Б., Ван Л., Фу З., Чжао Ю. 2009 г. Миниатюрные присоски Bioinspired, приводимые в действие сплавом с памятью формы. Int. J. Adv. Роб. Syst. 6, 151–160. (10.5772 / 7228) [CrossRef] [Google Scholar] 29. Фолладор М., Трамасере Ф, Маццолай Б. 2014 г. Приводы из диэлектрического эластомера для присосок в стиле осьминога. Биоинспир. Биомим. 9, 046002 (10.1088 / 1748-3182 / 9/4/046002) [PubMed] [CrossRef] [Google Scholar] 30.Хоу Дж., Бонсер Р., Жеронимидис Г. 2012 г. Разработка сенсорной кожи руки для робота, вдохновленного осьминогом В 2012 году IEEE Int. Конф. по робототехнике и автоматизации, Сент-Пол, Миннесота, США, 14–18 мая 2012 г., стр. 3840–3845. (10.1109 / ICRA.2012.6224715). [CrossRef] [Google Scholar] 31. Хоу Дж, Райт Э., Бонсер РХК, Джеронимидис Дж. 2012 г. Развитие биомиметических присосок на основе кальмаров. J. Bionic Eng. 9, 484–493. (10.1016 / S1672-6529 (11) 60144-3) [CrossRef] [Google Scholar] 32. Yeoh OH. 1993 г. Некоторые формы функции энергии деформации для резины.Rubber Chem. Technol. 66, 754–771. (10.5254 / 1.3538343) [CrossRef] [Google Scholar] 35. Чжан Б. и др. 2014 г. Двойная функциональная прозрачная пленка для определения приближения и давления. Nano Res. 7, 1488–1496. (10.1007 / s12274-014-0510-3) [CrossRef] [Google Scholar] 36. Чен X, Ян С., Савада Н., Мотодзима С. 2008 г. Конструкция и характеристики тактильных датчиков / датчиков приближения из углеродных микрокатушек. В Интеллектуальные датчики и сенсорная техника (ред. SC Mukhopadhyay, GS Gupta). Конспект лекций по электротехнике, т.20. С. 251–261. Берлин, Германия: Springer (10.1007 / 978-3-540-79590-2_17) [CrossRef] [Google Scholar] 37. Беркович Г., Шафир Э. 2012 г. Оптические методы измерения расстояний и перемещений. Adv. Оптика. Фотонный. 4, 441–471. (10.1364 / AOP.4.000441) [CrossRef] [Google Scholar] 38. Но Й, Саре С., Вюрдеманн Х, Лю Х., Хаусден Дж., Род К., Алтофер К. 2015 г. Трехосный волоконно-оптический датчик телесных сил для гибких манипуляторов. IEEE Sens. J. 99, 1641–1651. (10.1109 / ICRA.2014.62) [CrossRef] [Google Scholar] 39.Саре С., Но Й, Ранзани Т., Лю Х., Алтофер К. 2015 г. Волоконно-оптическая система с цепью Штайнера 7,5 мм для многосегментного измерения изгиба. В IEEE / RSJ Int. Конф. по интеллектуальным роботам и системам (IROS), Гамбург, Германия, 28 сентября — 2 октября 2015 г. (10.1109 / IROS.2015.7353692) [CrossRef] [Google Scholar] 40. Константинова Дж., Стилли А., Фарагассо А., Алтофер К. 2016 г. Датчик приближения пальца с визуальной калибровкой в реальном времени. В IEEE / RSJ Int. Конф. по интеллектуальным роботам и системам (IROS), Тэджон, Южная Корея, 9–14 октября 2016 г., стр.170–175. (10.1109 / IROS.2016.7759051) [CrossRef] [Google Scholar] 41. Саре С., Но Й, Ли М., Ранзани Т., Лю Х., Алтофер К. 2015 г. Оптическое определение макроизгиба для измерения позы мягкими руками робота. Smart Mater. Struct. 24, 125024 (10.1088 / 0964-1726 / 24/12/125024) [CrossRef] [Google Scholar] 42. Ван WC, Ledoux WR, Хуанг CY, Хуанг CS, Klute GK, Reinhall PG. 2008 г. Разработка микроизготовленного оптического датчика потерь на изгибе для измерения распределительного давления. IEEE Trans. Биомед. Англ. 55, 614–625. (10.1109 / TBME.2007.912627) [PubMed] [CrossRef] [Google Scholar] 43. Пуангмали П., Алтофер К., Сеневиратне Л.Д., Мерфи Д., Дасгупта П. 2008 г. Новейшие технологии и тактильные ощущения для малоинвазивной хирургии. IEEE Sens. J. 8, 371–381. (10.1109 / JSEN.2008.917481) [CrossRef] [Google Scholar] 45. Гордон Р.П. 1986 г. Аппарат для демонстрации отрицательного абсолютного давления и обычного давления пара. J. Chem. Educ. 63, 543–544. (10.1021 / ed063p543) [CrossRef] [Google Scholar] 46. Уэллс MJ. 1961 г. Распознавание веса осьминогом.J. Exp. Биол. 38, 127–133. [Google Scholar] 47. Зимний АГВ, Хосой А.Е. 2011 г. Идентификация и оценка атлантического моллюска-бритвы ( Ensis directus ) для использования в биологических системах подводного роения. Интегр. Комп. Биол. 51, 151–157. (10.1093 / icb / icr038) [PubMed] [CrossRef] [Google Scholar] 49. Ковач М. 2016 г. Учимся у природы, как приземлять воздушных роботов. Наука 352, 895–896. (10.1126 / science.aaf6605) [PubMed] [CrossRef] [Google Scholar]SEA SUCKER Cable Anchor Trunk
С Probikeshop вы гарантированно получите лучшую цену *!
Мы стремимся договориться о самых справедливых ценах для вас.Однако, если вы найдете наши продукты по более низкой цене в другом месте, просто отправьте нам электронное письмо, и мы возместим разницу.
Если вы найдете более низкую цену в другом месте, прежде чем совершить покупку:
Если перед покупкой товара на нашем веб-сайте вы найдете тот же товар по более низкой цене на другом веб-сайте, где есть система онлайн-платежей, мы предоставим вам подарочный сертификат, стоимость которого равна разнице в цене. Этот купон будет действителен только для этого продукта и только в течение 24 часов.
Если после покупки вы найдете более низкую цену в другом месте:
После покупки товара на нашем веб-сайте, если в течение 48 часов с момента размещения заказа вы найдете тот же товар (того же цвета, того же года выпуска, тех же характеристик, того же размера) по более низкой цене на другом веб-сайте, имеющем онлайн-версию платежной системой, мы возместим разницу!
Чтобы получить возмещение, отправьте нам электронное письмо со ссылкой на конкурирующее предложение по адресу [email protected], вместе с вашим именем и номером заказа.Сумма возмещения будет зачислена непосредственно на ваш счет.* Это предложение действительно только на материковой части Франции и не более чем на 10 единиц данного продукта. Товар должен быть идентичным (того же цвета, того же года выпуска, тех же характеристик, того же размера), а также товар должен быть в наличии. Предложение не распространяется на товары, которые продаются, продаются в рамках распродажи или продаются на аукционах или дисконтных сайтах.
НАЗАД
БЕСПЛАТНАЯ ДОСТАВКА / ВОЗВРАТ ЗА 2 €
Бесплатная доставка при заказе от 50 €
- В пунктах обслуживания (Mondial Relay & Relay XL)
- Объемные предметы включены
- В метрополии Франции
- Для всех заказов до 50 евро: 2 евро.99
Срок поставки: 3-4 рабочих дня (материковая Франция)
Возврат за 2 евро без минимальной покупки
- В пунктах обслуживания (Mondial Relay & Relay XL)
- Без учета крупногабаритных предметов
- В метрополии Франции
Вы хотите, чтобы ваш заказ был доставлен в течение 24/48 часов или к вам? Мы предлагаем вам ряд других поставщиков услуг доставки.
So Colissimo
(2-5 рабочих дней)
Стандарт ИБП
(Наложенный платеж)
UPS Express Saver
(круглосуточно)
France Express
(2 рабочих дня)
НАЗАД
100% нашей продукции в наличии
В Probikeshop мы не любим заставлять вас ждать.Вот почему 60 000 предлагаемых нами товаров всегда в наличии.
НАЗАД
Бесплатная доставка при заказе от 99 швейцарских франков *
При заказе на сумму более 99 швейцарских франков вы можете выбрать бесплатную доставку на дом через Swiss Post.
Отправка в тот же день всех товаров, заказанных и оплаченных до 15:00. *
Срок доставки: 2-4 рабочих дня.
* Такие товары, как велосипеды, беговелы, райдеры, скутеры, трехколесные велосипеды, детские велосипедные прицепы, детские сиденья, домашние тренажеры, чехлы для переноски велосипедов, велосипедные крепления, колесные пары, рамы, стенды для мастерских и т. Д.считаются громоздкими и не включены в данное предложение.
НАЗАД
Биологически вдохновленная мягкая искусственная присоска
14
[22] Tramacere, F., Appel, E., Mazzolai, B., Gorb, SN (2014) «Волосатые присоски: микроструктура поверхности и ее
возможное функциональное значение в присоски Octopus vulgaris », Beilstein J. Nanotechnol., 5, 561–565.
(DOI: 10.3762 / bjnano.5.66).
[23] Tramacere, F., Beccai, L., Kuba, M., Gozzi, A., Bifone, A., Mazzolai, B. (2013) Морфология и адгезия
Механизм присосок Octopus vulgaris. PLoS ONE 8 (6): e65074. (DOI: 10.1371 / journal.pone.0065074).
[24] Tramacere, F., Kovalev, A., Kleinteich, T., Gorb, S.N., Mazzolai, B. (2014) Структура и механические свойства
присосок Octopus vulgaris, J. R. Soc. Интерфейс 2014 11 20130816. (DOI: 10.1098 / rsif.2013.0816).
[25] Трамасере, Ф., Follador, M., Pugno, N.M., Mazzolai, B. (2015) Присоски, подобные осьминогу: от натуральных до
искусственных растворов. Биоинспирация и биомиметика 10: 035004. (DOI: 10.1088 / 1748-3190 / 10/3/035004).
[26] Ху, Б., Ван, Л., Фу, З., Чжао, Ю. (2009) Миниатюрные присоски с биовдохновлением, приводимые в действие сплавом с памятью формы.
Международный журнал передовых робототехнических систем. 6 (3), 151–160. (DOI: 10.5772 / 7228).
[27] Фолладор М., Трамасере Ф., Маццолай, Б. (2014) Диэлектрические эластомерные приводы для присосок, вдохновленных осьминогами.
Биоинспирация и биомиметика, 9 (4): 046002. (DOI: 10.1088 / 1748-3182 / 9/4/046002).
[28] Хоу Дж., Бонсер Р. и Джеронимидис Г. (2012) Разработка сенсорной кожи руки для робота, вдохновленного осьминогом. В:
2012 Международная конференция IEEE по робототехнике и автоматизации, 14-18 мая 2012 г., Сент-Пол, США, стр. 3840-
3845. (DOI: 10.1109 / ICRA.2012.6224715).
[29] Хоу, Дж., Райт, Э., Бонсер, Р.Х.К., Джеронимидис, Г. (2012) Разработка биомиметических присосок, вдохновленных кальмарами.
J. Bionic Eng. 9, 484–493. (DOI: 10.1016 / S1672- 6529 (11) 60144-3).
[30] Бартлетт, Н.В., Толли, М.Т., Овервелде, Дж. Т. Б., Уивер, Дж. К., Мосадех, Б., Бертольди, К., Уайтсайдс, Г. М.,
Вуд, Р.Дж. (2015) Напечатанный на 3D-принтере мягкий робот с функциональной градацией, работающий от горения. Наука. 2015; 349: 161-
165. (DOI: 10.1126 / science.aab0129).
[31] Саре, С., Цзян, А., Фарагассо, А., Но, Ю., Нанаяккара, Т., Дасгупта, П., Сеневиратне, Л., Вюрдеманн, Х.,
Althoefer, K. (2014) Bio-Inspired Tactile Sensor Sleeve for Surgical Soft Manipulators, in Proceedings of the
IEEE International Conference on Robotics Automation (ICRA), pp. 1454-1459. (DOI:
10.1109 / ICRA.2014.63).
[32] Йео, О. Х. (1993) «Некоторые формы функции энергии деформации для резины», Химия и технология резины,
, том 66, выпуск 5, ноябрь 1993, страницы 754-771. (DOI: 10,5254 / 1,3538343).
[33] ABAQUS Inc., Гипеупругое поведение резиноподобных материалов, Руководство пользователя ABAQUS Analysis. Раздел
22.5.1. (http://abaqus.software.polimi.it/v6.12/pdf_books/ANALYSIS_3.pdf).
[34] Хуат Л.Г., Настраиваемые мягкие пневматические захватные устройства, Диссертация на соискание ученой степени магистра, Национальный университет Сингапура, 2015.
(http://scholarbank.nus.edu.sg/handle/10635/120577).
[35] Чжан, Б., Сян, З., Чжу, С., Ху, К., Цао, Ю., Чжун, Дж., Чжун, К., Ван, Б., Фанг, Ю., Ху, Б., Чжоу, Дж.и
Ван З. (2014) Двойная функциональная прозрачная пленка для измерения приближения и давления, Nano Research, 7 (10), 1488-
1496. (DOI: 10.1007 / s12274-014-0510-3).
Don’t Be a Sucker — масло и вода не смешиваются
Энбридж сыграл бывшего губернатора Мичигана Снайдера и генерального прокурора Шуэтта для бездельников, приняв закон, который разрешает строительство тоннеля для канадской нефти под проливом Макино. Почему нас играли в лохов? Закон не требовал, чтобы Энбридж строил туннель, и фактически не указывал дату окончания строительства туннеля. Худшая сделка КОГДА-ЛИБО.
Enbridge также постепенно меняет конструкцию линии 5 без получения необходимого разрешения.
Линия 5 — это кратчайший путь канадской нефти через Мичиган и Великие озера. Зачем подвергать наше государство и водные ресурсы большому риску, если мы почти не используем масло? Почему бывший губернатор Снайдер не встал на защиту Мичигана и Великих озер?
В этом выступлении Кейт Мэдиган, директора Michigan Climate Action Network, записанном на вечеринке по случаю выхода на пенсию Line 5 в апреле 2018 года, это изложено более подробно.
Риск разлива нефти теперь очень реален после того, как якорь корабля ударился и повредил линию 5 в Проливе в апреле 2018 года.В период с ноября 2019 года по июнь 2020 года произошло еще как минимум два инцидента, один из которых серьезно повредил анкерную опору трубопровода. Оказывается, ущерб был нанесен подрядчиками Enbridge. Серьезные опасения, наконец, заставляют выборных должностных лиц сказать «достаточно», и сейчас мы наблюдаем растущее двухпартийное соглашение о том, что мы должны закрыть линию 5. Мы аплодируем этим выборным должностным лицам и призываем других сделать то же самое.
Нам нужно прояснить одну вещь. Туннель — это НЕ решение для нашего штата, Великих озер или планеты.
Прежде чем мы рассмотрим несколько способов, которыми Enbridge хочет сыграть с нами как лохов, нам нужно понять, как они действуют.
Как Enbridge обходит экологические нормы
Если катастрофа с разливом нефти на реке Каламазу в Энбридже и научила нас чему-то, так это тому, что Энбридж не удовлетворен существующим положением дел. Строительство новых или увеличение пропускной способности существующих трубопроводов означает, что необходимо соблюдать строгие экологические экспертизы и правила, включая оценку потребности в любой новой инфраструктуре.Время от времени Enbridge расширяет свою сеть в обход этих правил. Для доказательства не нужно смотреть дальше примера, который был подан в Мичигане после разлива нефти на реке Каламазу в 2010 году.
После разлива реки Каламазу, крупнейшего разлива нефти на суше в истории США, Энбридж заменил прорвавшуюся линию 6b новым, более крупным трубопроводом, который удвоил его пропускную способность. Эта замена производилась поэтапно и называлась Enbridge «управлением целостностью» (обслуживанием), в то время как на самом деле и по любым меркам заменой была новая инфраструктура.Подобная поэтапная перестройка трубопровода означала, что новый трубопровод обошел экологические нормы, которые заставили бы Enbridge продемонстрировать необходимость в увеличении пропускной способности. В этом видео подробно рассказывается, как именно это произошло.
Масло линии 5 не для Мичигана
Бесконечный квест Enbridge по расширению своих мощностей по транспортировке сырой нефти по линии 5 и по всей системе Lakehead в Великих озерах является частью инициативы под названием Enbridge Eastern Access Capacity Expansion.
Серия проектов по улучшению инфраструктуры увеличила поток нефти по линии 5, заменила вышедший из строя трубопровод по линии 6b через южный Мичиган трубой большего размера, а также увеличила и изменила направление потока нефти по линии 9, которая раньше текла из Монреаля. в Сарнию (сейчас течет на восток).
Enbridge в настоящее время пытается расширить свою линию трубопровода 3 в Миннесоте от Альберты до Супериор, штат Висконсин — начало линии 5, линии 6, линии 61 и линии 14/64.
95% продукции, проходящей по линии 5, проходит через Мичиган и обратно в Канаду.
Рекламная кампания Enbridge, продвигающая потребность в продуктах Line 5 в Мичигане, является демонстрацией их общей цели: переместить больше нефти из битуминозных песков из Альберты, на восток, через район Великих озер, обратно в Канаду, и на экспорт.
Посмотрите наш новый видеоролик, в котором канадский эксперт по энергетике объясняет, почему нефть Line 5 не для Мичигана.
Если мы продолжим поток нефти по линии 5, потому что это принесет пользу Мичигану, Энбридж сыграет с нами в бездельников.
Четырехдюймовый трубопровод может подавать пропан к UP
Энбридж любит говорить, что без пропана, поставляемого по линии 5, «бабушки в U.P. замерзнет. »
Хотя в настоящее время верно, что менее половины поставок пропана на Верхний полуостров поступает по линии 5, это часть продукта, которая проходит по трубопроводу.
Исследование Dynamic Risk, финансируемое Энбриджем, показало, что новый 4-дюймовый трубопровод может поставлять этот пропан (стр. K-2 этого отчета).Пока такой трубопровод не будет построен, один железнодорожный вагон пропана в день может удовлетворить потребности США.
Захват Великих озер в заложники, аргументируя это тем, что Верхнему полуострову нужна линия 5 для пропана, игнорируя очевидное решение строительства нового 4-дюймового трубопровода, является слабым аргументом, который не может выдвинуть ни один разумный или благоразумный человек. Тем не менее, Энбридж постоянно заявляет об этом.
Enbridge — трубопроводная компания. Почему они не предлагают построить 4-дюймовый трубопровод, чтобы, как они постоянно говорят, заботиться о жителях Мичигана?
Если мы продолжим поток нефти по линии 5 через Великие озера, потому что U.П. нужен пропан, Энбридж сыграет нас в лохов.
Проект новой запрещенной линии 5
Когда трубопровод Line 5 был построен в проливе Mackinac и открыт в 1953 году, утвержденная конструкция предусматривала поддержку двух трубопроводов, лежащих непосредственно на дне озера. Сервитут, предоставленный штатом Мичиган для использования дна озера для этого частного трубопровода, определил, среди нескольких других условий, максимальный безопорный пролет 75 футов.
Со временем огромные течения в проливе Макино начали размывать дно озера под трубами.Чтобы устранить смывы, Enbridge начала использовать мешки для раствора для поддержки трубопровода. По мере увеличения количества промывок в начале 2000-х годов Enbridge начала устанавливать большие винтовые анкеры для поддержки трубы под промывками. Со временем Enbridge установила 128 анкерных болтов. Штат санкционировал установку еще 22 анкеров, которые были установлены летом 2018 года, а компания Enbridge подала заявку на установку дополнительных 48 анкеров весной 2018 года.
Эти якоря превратили трубопровод из трубопровода, проложенного непосредственно на дне озера, в трубопровод с большими пролетами, подвешенными в воде над дном озера.Эти возвышенные пролеты больше подвержены воздействию течений в Проливах, где объем воды «более чем в 10 раз больше, чем поток через Ниагарский водопад». Полученная конструкция представляет собой новую конструкцию трубопровода, которая никогда не была одобрена или разрешена. Новый судебный иск, оспаривающий любые новые анкеры. предполагает, что эта новая конструкция подвергает трубопровод более высокому риску разрыва.
Если эта заявка на другие 48 анкеров к исходной конструкции трубопровода разрешена в качестве «ремонта» или «технического обслуживания», Департамент качества окружающей среды штата Мичиган и U.Инженерный корпус S. Army получит разрешение Enbridge на установку в общей сложности 198 анкерных кронштейнов на трубопроводы линии 5 на поймах и акваториях общественного пользования. Это означает, что Enbridge снова обойдет стороной обязательную всестороннюю проверку рисков, воздействий или альтернатив в соответствии с законом.
В качестве дополнительного доказательства того, что анкеры-шурупы меняют конструкцию, было обнаружено, что анкеры повреждают защитное покрытие на трубопроводе.
См. Неудавшиеся мешки для раствора и примеры анкеров в этом видео.
Конструктивно, более 2 миль трубопровода в настоящее время подняты в общественные целевые воды над поймами. И учитывая недавние вмятины в двойных линиях, разрыв линии электропередач и выброс токсичных жидкостей, риски для Великих озер неприемлемы.
Если новые разрешения на якорь линии 5 будут одобрены, Enbridge будет выставлять нас за бездельников.
Тоннель под проливом — не решение
Если прокладка трубопроводов линии 5 в туннеле под проливом Макино кажется хорошей идеей, подумайте еще раз.
Для разрешения и строительства туннеля потребуется несколько лет, и некоторые эксперты считают, что это вряд ли когда-либо разрешат. Простые разговоры о туннеле дали Enbridge еще 10 лет добычи нефти и прибыли, пока туннель исследуется. Из-за этой задержки по нынешнему трубопроводу Линии 5 ежедневно через Великие озера перемещается 23 миллиона галлонов нефти и продуктов природного газа, в то время как Мичиган остается под угрозой разлива нефти в обозримом будущем.
Добыча битуминозных песков в Альберте, Канада
С новым туннелем вы можете быть уверены, что Энбридж не удовлетворится сохранением остальных 640 миль линии 5 как есть.Ему, несомненно, необходимо будет окупить свои инвестиции в туннель, расширив линию 5 до другого канала для тяжелой сырой нефти (также известной как битуминозные пески) из Альберты, Канада. Эти битуминозные пески являются самым грязным ископаемым топливом на планете, и через Великие озера они станут каналом на долгие годы экстремальных климатических воздействий и на десятилетия повышенного риска разлива нефти.
При переработке и использовании битуминозных песков выделяется больше парниковых газов, чем от любого другого ископаемого топлива. При очистке он загрязняет близлежащие сообщества, например, живущие рядом с нефтеперерабатывающим заводом Marathon в Детройте.При извлечении он подвергается открытой добыче, уничтожая целые экосистемы и вытесняя сообщества.
Когда нефтяные трубопроводы из битуминозных песков разливаются, их невозможно полностью очистить, как мы уже узнали здесь, в Мичигане, когда один миллион галлонов битуминозных песков вылился в реку Каламазу, что стало худшим разливом нефти во внутренних водах в истории США.
Значительные разливы нефти и острая необходимость в сокращении количества выбросов CO2 в атмосферу диктуют, что пора прекратить создание новой инфраструктуры, работающей на ископаемом топливе, и перейти на более чистые формы энергии.